

/https%3A%2F%2Fprofilepics.canalblog.com%2Fprofilepics%2F2%2F5%2F251882.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F64%2F27%2F292736%2F92462161_o.jpeg)
/https%3A%2F%2Fstorage.canalblog.com%2F23%2F27%2F292736%2F70560294_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F19%2F68%2F292736%2F64938275_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F50%2F84%2F292736%2F52050599_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F10%2F87%2F292736%2F22707813_o.jpg)
14 janvier 2017
La force forte n'existe pas
/http%3A%2F%2Fstorage.canalblog.com%2F81%2F56%2F292736%2F114252654_o.jpg)
Les physiciens nucléaires prétendent que l'énergie nucléaire est due à l'équilibre entre la "force de Coulomb", répulsive entre protons et une mystérieuse "force forte", attractive, supposée l'équilibrer. Malheureusement, les lois fondamentales de la "force forte" restent inconnues...
La découverte de Rutherford il y a un siècle:
Le noyau atomique a été découvert par un Anglais, Rutherford. Il a utilisé les expériences de Geiger et Marsden envoyant des particules alpha à travers de feuilles d'or. Les particules alpha traversaient les feuilles d'or mais pouvaient même, étonnament, être réfléchies. Cela ne pouvait s'expliquer que par l'existence d'un noyau atomique beaucoup plus petit que l'atome. Il a appliqué la loi électrique de Coulomb donnant une pente -2 aux faibles vitesses des particules. Aux grandes vitesses, la formule ne fonctionnait plus, d'où le terme de "diffusion anormale". Biéler avait essayé une attraction magnétique alors qu'il suffisait de remplacer, dans la formule de Rutherford, répulsive, le -2, électrique, par -6, magnétique, comme le prouve le graphique ci-dessous, en accord avec des expériences datant de 1954:
 On remarque les deux droites de pentes -2 et -6 en coordonnées logarithmiques, correspondant aux potentiels en 1/r, électrique, de Coulomb, et 1/r³, magnétique, de Poisson. Les exposants deviennent -2 et -6 car il s'agit de surfaces.
On remarque les deux droites de pentes -2 et -6 en coordonnées logarithmiques, correspondant aux potentiels en 1/r, électrique, de Coulomb, et 1/r³, magnétique, de Poisson. Les exposants deviennent -2 et -6 car il s'agit de surfaces.
L'énergie nucléaire:
Un des autres problèmes de la physique nucléaire, sans doute le plus important, est celui de l'énergie nucléaire dont les lois fondamentales, inconnues jusqu'à présent, sont prétendument dues à une hypothétique "force forte", attractive.
Les installations nucléaires ne peuvent donc être construites que sur des bases empiriques, les lois fondamentales étant inconnues des physiciens nucléaires officiels.
J'ai découvert que, comme la diffusion nucléaire, l'énergie nucléaire est électromagnétique. C'est simple: le noyau atomique, de rayon r, est 100.000 fois plus petit que l'atome. En appliquant la lois électrique de Coulomb en 1/r, on trouve que l'énergie correspondante est 100.000 fois plus grande que l'énergie chimique (un million selon Pierre Curie). Inutile de chercher midi à quatorze heures…
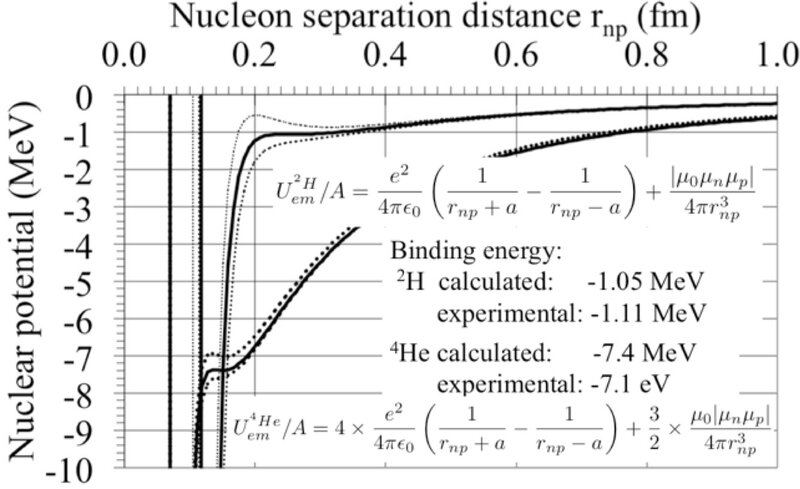
 Ce graphique montre comment la simple application des lois de Coulomb et de Poisson donne les énergies de liaison de l'hydrogène lourd, appelé aussi deuton ou ²H, et de la particule alpha, appelée aussi hélium 4 ou ⁴He. On remarque les points d'inflexion horizontaux correspondant, comme par hasard, aux énergies de liaison nucléaire.
Ce graphique montre comment la simple application des lois de Coulomb et de Poisson donne les énergies de liaison de l'hydrogène lourd, appelé aussi deuton ou ²H, et de la particule alpha, appelée aussi hélium 4 ou ⁴He. On remarque les points d'inflexion horizontaux correspondant, comme par hasard, aux énergies de liaison nucléaire.
On sait que les électrons tournent autour du noyau, lui-même constitué de protons et de neutrons supposés collés par la mystérieuse force forte. Après un siècle de physique nucléaire, personne ne connaît la formule fondamentale de l'énergie nucléaire comme celles de l'électromagnétisme, connues depuis 2 siècles.
Un seul académicien a répondu à ma question:
"La réponse à votre question n’est pas simple. Nous pensons avoir compris la nature de cette interaction au niveau le plus élémentaire.
A ce niveau la il s’agit de la force qui lie les quarks à l’intérieure d’un proton ou un neutron. Cette force est attractive,
assez simple, et ressemble à la force qui lie les electrons au noyau dans l’atome (elle aussi attractive).
Par contre la force proprement dite Nucléaire qui, elle, lie les protons et le neutrons dans un noyau, est plus compliquée, un peu comme la force qui lie les atomes entre eux pour former des molécules.
J’espère que cette comparaison puisse vous aider."
Il reconnaît donc qu'il ne sait pas; on remarquera qu'il n'aime pas la simplicité. Il suffit pourtant d'appliquer les lois fondamentales de Coulomb, électrique, et de Poisson, magnétique, pour résoudre le problème, comme je le montre sur la figure.
Les physiciens nucléaires ne connaissent que ce qu'ils appellent "force de Coulomb", répulsive, supposée équilibrée par la "force forte", attractive, sans loi fondamentale connue donc non fondamentale. Ils ignorent qu'un proton attire un neutron, pas si neutre, de la même façon que l'ambre frottée attire les matériaux légers. Ils ignorent aussi le magnétisme. Ces deux phénomènes ont pourtant été découverts qualitativement il y a deux millénaires par le premier physicien, Thalès de Milet. Avec les formules de Coulomb et Poisson on est capable de calculer les interactions nucléaires quantitativement: je suis le seul à l'avoir essayé: les physiciens nucléaires ne coonaissent, de l'interaction électromagnétique, que la répulsion électrique entre protons.
Les lois fondamentales de la nature seraient 4, la gravitation, l'électromagnétisme plus deux petites nouvelles, non prouvées, la force forte et la force faible. La gravitation et l'électricité ont toutes les deux une force en 1/r2 et un potentiel en 1/r. Les deux autres sont, au mieux, empiriques, c'est à dire avec des formules variables selon les auteurs, donc non fondamentales. Lorsqu'on pose la question des lois fondamentales de l'interaction nucléaire, on n'obtient que des réponses évasives. Il existe bien quelques équations comme celle de Yukawa, mais de coefficients ajustés.
Si vous cherchez sur Internet les "Lois Fondamentales de la Physique Nucléaire" vous ne trouvez que moi qui s'y intéresse. Si vous faites "Lois Fondamentales" "Physique Nucléaire" vous trouvez "Lois Fondamentales de l'Univers". Toujours sur Google, en anglais: "Fundamental laws of nuclear physics" où la moitié est de moi.
Energie nucléaire et énergie chimique
La grande différence entre les potentiels chimique et nucléaire est la taille de l'atome et de son noyau:
le noyau de l'atome d'hydrogène est de 0,5.10¯¹⁰ m et celle de son noyau de 1,2.10⁻¹⁵ m, soit un rapport de 240.000. Concrètement, si on applique la loi de Coulomb en 1/r, on a aussi un rapport de 240.000, mais inversé. L'énergies de liaison nucléaire du deuton, appelé aussi hydrogène lourd, constitué d'un proton et d'un neutron est de 2,2 MeV et celle de l'atome d'hydrogène, lourd ou pas est de 13,6 eV, soit un rapport de 160.000 du même ordre de grandeur que le rapport énergie nucléaire/énergie chimique de 240.000, obtenu plus haut.

Revenons à la "force forte" censée "expliquer" l'énergie nucléaire. Après quelque recherches dans la littérature, j'ai trouvé son origine, apparemment inconnue des physiciens nucléaires "modernes". Son origine, séculaire, imaginée par Chadwick, le découvreur du neutron, d'ailleurs pas si neutre puisqu'il contient des charges électriques de somme nulle. Il a proposé la formule, considérée par les physiciens nucléaires comme dépassée par on ne sait quoi sinon par le concept vide de la "force forte".
Ce n'est pas précisé, mais B semble positif ici. On remarque la présence de la loi de Coulomb du potentiel en 1/r accompagnée du potentiel de la force forte en 1/rn dont l'exposant serait compris entre n=2 comme l'électricité et n=4, en passant par la force magnétique où n=3 puisque le potentiel magnétique est en 1/r³. Pour obtenir la force forte, il faut encore déterminer n, que Bieler a supposée très justement magnétique, donc avec n=3. Malheureusement, il n'a pas réussi car il a gardé le signe - de Chadwick. Il a suffi de remplacer le - par un + pour résoudre le problème.


Sans rentrer dans les détails, on remarque que, pour un angle θ constant et un noyau déterminé, impacté par les particules α, cette formule se simplifie en:

où il ne reste que la masse de la particule α et sa vitesse v₀, c'est-à-dire l'énergie cinétique de la particule α qui va impacter le noyau considéré. Logarithmiquement, cette formule devient:

On obtient alors, en coordonnées logarithmiques, une droite de pente -2, comme le montre la figure ci-dessous.
Lorsque l'énergie cinétique dépasse l'énergie de liaison de la particule α, la pente augmente anormalement et devient -6, magnétique, au lieu de -2, électrique. La courbe comporte donc deux parties, la première correspond à la découverte de Rutherford et la seconde, soit-disant anormale, est, en réalité, magnétique, de pente -6. Comme pour la partie électrique, l'exposant est multiplié par 2, les particules α étant détectées sur une surface. Pour obtenir ce résultat, il suffit tout simplement de remplacer le 2, électrique (loi de Coulomb en 1/r), de Rutherford, par le 6, magnétique (loi de Poisson en 1/r³). La "force forte", hypothétique, devient alors magnétique, loi fondamentale:

Le graphique ci-dessous montre les deux droites électrique (pente -2) et magnétique (pente -6) en coordonnées logarithmiques.
 La physique autoproclamée "moderne" est, en réalité, à côté de la plaque.
La physique autoproclamée "moderne" est, en réalité, à côté de la plaque.
 On reconnaît le potentiel électromagnétique démontré dans ma présentation à Dubna, au centre nucléaire russe (http://isinn.jinr.ru/past-isinns/isinn-22/progr-27_05_2014/Schaeffer.pdf), où un jeune chercheur m'a suggéré d'étudier la diffusion.
On reconnaît le potentiel électromagnétique démontré dans ma présentation à Dubna, au centre nucléaire russe (http://isinn.jinr.ru/past-isinns/isinn-22/progr-27_05_2014/Schaeffer.pdf), où un jeune chercheur m'a suggéré d'étudier la diffusion.
Il y a deux millénaires, les Européens dominaient le monde. La Grèce avait posé les bases de la science moderne et même imaginé l'atome. Les Romains ont ensuite conquis le monde méditerranéen mais les Barbares veillaient et s'infiltraient malgré les armées et les barrières aux frontières (le mur d'Hadrien entre l'Angleterre et l'Ecosse et celui de Trajan en Allemagne et, accessoirement, la Muraille de Chine). Il y a eu un empereur romain africain, Septime Sévère. Les riches de l'empire romain sont dominés par le luxe et la luxure. Les pauvres vivaient des distributions de blé par l'assistance publique impériale. Pour occuper les loisirs des citoyens, on leur donna des fêtes et des distractions (Albert Malet). L'empire romain a disparu quelques siècles plus tard, au Moyen-Âge où la science a redémarré avec les alchimistes.
Au début du 20e siècle les Européens dominaient le monde. Ils avaient prouvé l'existence de l'atome et de son noyau. Les Américains, qui ont aussi leur Africain, Obama, ont remplacé les Romains et les Européens, la Grèce. On installe des barrières aux frontières, peu efficaces. En fait l'Europe se débobine: on avait un timbre unique, qui a disparu, une frontière commune qui vole en éclats...etc. Actuellement les physiciens nucléaires croient à une "force forte" imaginaire, du même genre que la "France forte".
L'INDUSTRIE NUCLEAIRE
Le tarif de l'électricité va augmenter pour payer les erreurs de nos ingénieurs dans la construction des nouvelles centrales dites EPR où les énormes cuves acier sont fragilisées par la radioactivité. On ne s'est même pas donné la peine de vérifier la résistance des pièces à la radioactivité et aux cycles thermiques!
Yves Brechet, le nouveau patron a passé son temps à écrire l'éloge de Friedel récemment décédé au lieu de s'occuper du problème des cuves de l'EPR.
Les principaux acteurs de la filière nucléaire française ont fait valoir leur point de vue au sujet de la cuve de l'EPR, à l'occasion d'une audition parlementaire. Mais les échanges, particulièrement tendus, ont surtout renforcé les interrogations (http://m.actu-environnement.com/actualites/cuve-epr-flamanville-nucleaire-opecst-audition-24841.html)
LA RECHERCHE NUCLEAIRE
Il y a in siècle Rutherford a découvert le noyau atomique en envoyant des particules alpha électriques sur des feuilles d'or. Ces particules étaient déviées et même réfléchies, prouvant l'existence d'un noyau de l'atome très petit chargé électriquement. En deux semaines, il a calculé la trajectoire de ces particules en appliquant la loi de Coulomb de l'électricité. Plus tard, aux grandes vitesses de ces particules, on s'est aperçu que la loi de Coulomb ne fonctionnait plus. Alors on a imaginé une force nouvelle, la "force forte", accompagnée, pour faire bonne mesure, d'une "force faible". Dans les années 30 on a découvert les moments magnétiques des nucléons. Cela veut dire que la répulsion magnétique pouvait devenir plus importante que la répulsion électrique. L'application de l'électromagnétisme permet de calculer à la fois l'énergie de liaison nucléaire et la diffusion soi-disant anormale de Rutherford. Personne ne l'avait remarqué avant moi. La légende de la "force forte" reste dans la science officielle.
La simple application des lois de l'électricité et du magnétisme permet de calculer l'énergie d'au moins les deux noyaux les plus simples:
La diffusion de Rutherford électrique est connue depuis un siècle mais sa soeur dite "anormale", jamais calculée jusqu'à présent, est tout bêtement magnétique:
En échelles logaritmiques on obtient tout simplement des droites: inutile de chercher midi à quatorze heures.
Le noyau atomique a été découvert il y a un siècle. On sait qu'il est constitué de protons et de neutrons comme un mélange d'oranges et de citrons. Lorsqu'on sort les oranges et les citrons de leur panier, ils s'étalent au sol. Pour les faire tenir ensemble, une seule solution, la colle. Dans le noyau atomique, on a une colle forte, les gluons de la "force forte".
Malheureusement tout cela est de la science fiction: personne ne sait calculer l'énergie nucléaire de cette façon car les lois fondamentales de la force dite "forte" sont inconnues, mystère et boule de gomme.
Eh bien, moi je l'a trouvé: les forces en question sont connues de chacun d'entre vous. Dans le noyau atomique, les nucléons (nom générique des neutrons et protons mélangés) s'attachent tout bonnement par l'attraction électrique, équilibrée par la répulsion magnétique. Comme par hasard, la simple application de l'électromagnétisme, découvert il y a deux siècles par les français Coulomb pour l'électricité et Poisson pour les moments magnétiques mais dont les physiciens nucléaires ne connaissent que la répulsion entre protons.
Les protons sont chargés positivement et les neutrons ne sont pas vraiment neutres car ils contiennent des charges électriques de somme nulle. C'est exactement pareil que lorsqu'on attire des bouts de papier avec un stylo frotté, connu de tous les enfants mais ignoré des physiciens nucléaires qui croient que les nucléons peuvent orbiter comme la Terre autour du Soleil alors que le noyau n'a pas de soleil.
Il ne suffit pas d'attirer les protons, il faut aussi une force capable d'équilibrer l'attraction: c'est le magnétisme. En effet, les nucléons sont des tout petits aimants capables de créer une répulsion entre les nucléons et, donc d'équilibrer l'attraction électrique.
Comme par hasard, le calcul donne l'énergie de liaison du plus simple des noyaux, celui de l'hydrogène lourd ²H et d'autre noyaux simples (détails dans d'autres pages de ce blog).
La force forte nucléaire est imaginaire.
La mystérieuse "force forte" alias LQCD, à côté de la plaque, disparaîtra comme le géocentrisme grâce à Copernic, Galilée et Képler, le phlogistique grâce à Lavoisier, l'éther grâce à Einstein et le modèle plum-pudding de J.J. Thomson grâce à Rutherford. Les lois de Coulomb et de Poisson sont méconnues des physiciens nucléaires, incapables de calculer même le noyau lié le plus simple, le deuton ou hydrogène lourd ²H, sinon par ajustement ad hoc, fitting… ce qui permet d'obtenir ce qu'on veut. Depuis les Curie, la France n'a plus contribué significativement à la physique nucléaire. Ci-dessous le graphique des potentiels électromagnétiques de ²H et ⁴He donnant, au palier horizontal, comme par hasard, leurs énergies de liaison, prouvant la nature électromagnétique de l'énergie nucléaire.
 Un simple raisonnement donne un résultat voisin. L'énergie potentielle électrique de l'hélium 4 (particule α ou ⁴He) est 4 fois plus importante que celle du deuton (hydrogène lourd ²H) car il a 4 liaisons neutron-proton au lieu d'une dans le deuton. Il faut aussi tenir compte de la répulsion magnétique, qui n'est pas de 4 mais de 3/2. La répulsion étant relativement plus faible, on doit multplier 4 par 3/2, soit 6 MeV pour une valeur expérimentale de 7 MeV.
Un simple raisonnement donne un résultat voisin. L'énergie potentielle électrique de l'hélium 4 (particule α ou ⁴He) est 4 fois plus importante que celle du deuton (hydrogène lourd ²H) car il a 4 liaisons neutron-proton au lieu d'une dans le deuton. Il faut aussi tenir compte de la répulsion magnétique, qui n'est pas de 4 mais de 3/2. La répulsion étant relativement plus faible, on doit multplier 4 par 3/2, soit 6 MeV pour une valeur expérimentale de 7 MeV.
Diffusion dite "anormale" de Rutherford
Je viens d'obtenir une nouvelle preuve de la nature électromagnétque de l'énergie nucléaire. En effet, j'ai trouvé que la diffusion dite "anormale" de Rutherford était magnétique, de même que la diffusion "normale" de Rutherford est électrique. Dans une présentation log-log, on obtient une droite pour chacune des courbes. Le rapport de leurs pentes est en effet de 3 comme entre les lois de Coulomb, en 1/r, et de Poisson, en 1/r³:
Pour plus de détails, voir ma présentation à Dubna, le centre nucléaire russe (http://isinn.jinr.ru/past-isinns/isinn-22/progr-27_05_2014/Schaeffer.pdf):
/http%3A%2F%2Fstorage.canalblog.com%2F93%2F23%2F292736%2F107254682_o.jpg)
/http%3A%2F%2Fstorage.canalblog.com%2F70%2F09%2F292736%2F66513102_o.jpg)

